Hardware
- Custom AVR controller PCB
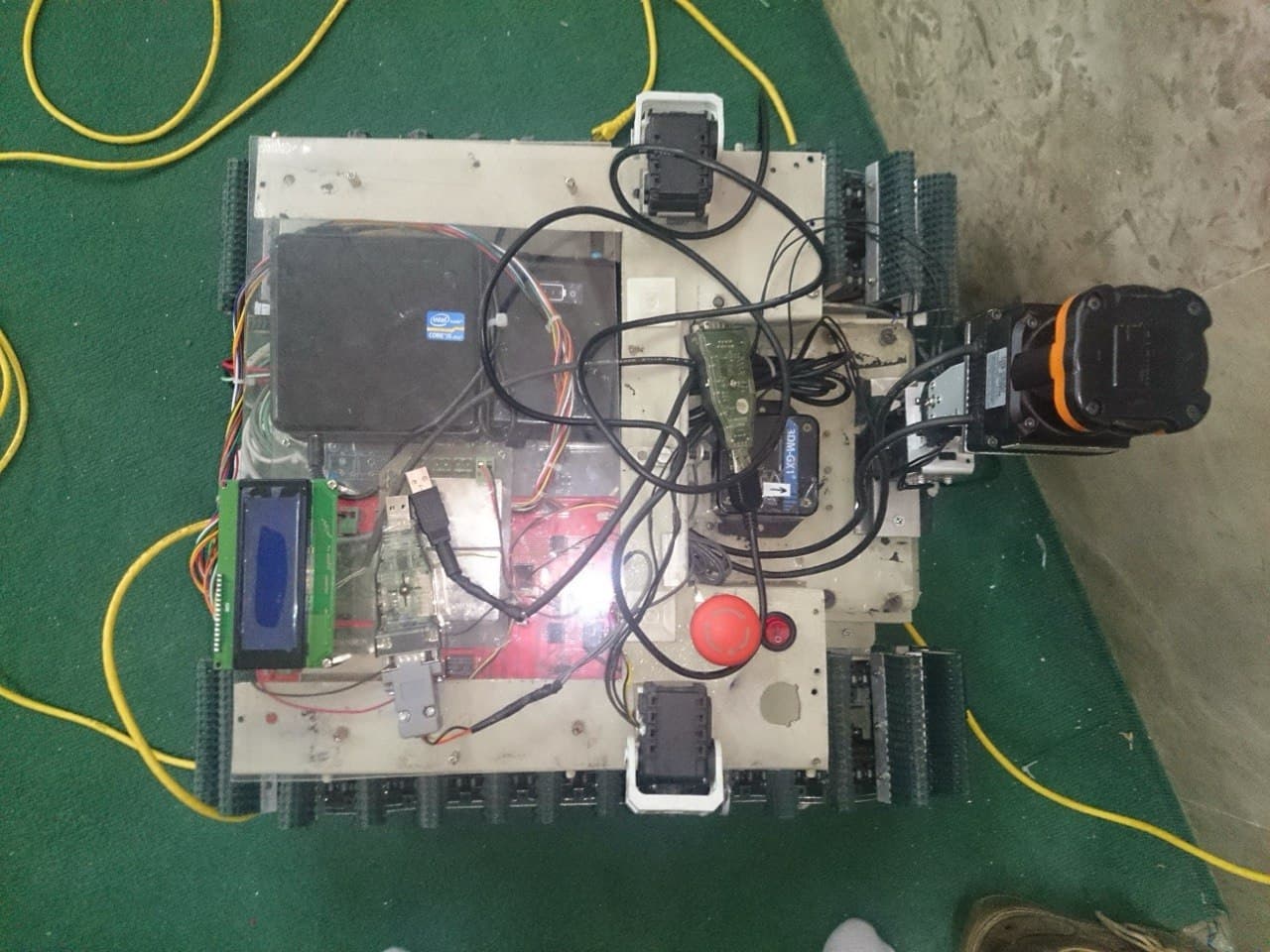
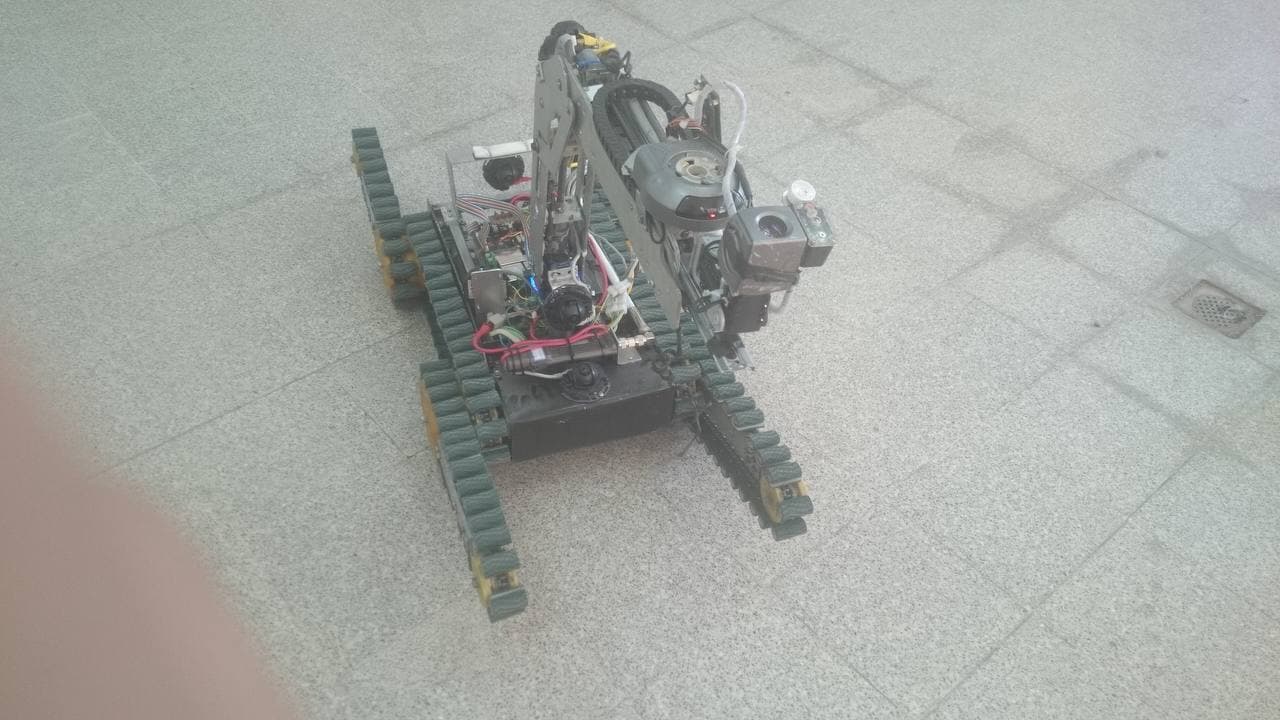
- Tracked rescue robot platform
- Embedded sensor interfaces
- UAV embedded controller hardware
- Teleoperation control systems
Robotics
Developed embedded control systems, autonomous navigation, SLAM, and UAV subsystems for the YRA RoboCup Rescue Team, achieving two international Best-in-Class first-place awards at RoboCup 2014 in Brazil.
Summary
Developed embedded control systems, autonomous navigation, SLAM, and UAV subsystems for the YRA RoboCup Rescue Team, achieving two international Best-in-Class first-place awards at RoboCup 2014 in Brazil.
Embedded Systems and Robotics Engineer
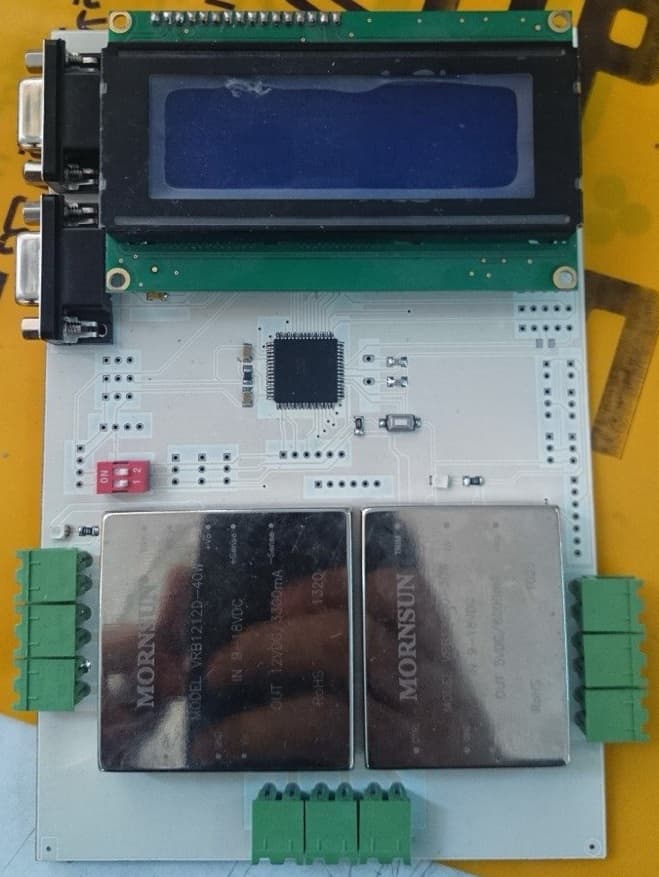



A custom AVR microcontroller board was developed to interface with motors, sensors, communication modules, and robot subsystems.
The board included:
Firmware was written in Embedded C for deterministic low-level control and subsystem coordination.
The robot autonomy stack was developed using ROS1.
Hector SLAM was used for real-time localization and mapping, while fuzzy logic algorithms were implemented for autonomous navigation behavior and obstacle handling.
The robot supported both:
This hybrid architecture allowed flexible operation depending on mission conditions.
I also contributed to the UAV embedded flight-control subsystem used in the RoboCup Rescue Small UAV category.
The UAV platform required stable embedded control, sensor integration, and autonomous flight behavior suitable for rescue robotics tasks.
The YRA team achieved:
at RoboCup 2014 in Brazil.
These awards recognized the system’s performance in rescue robotics autonomy, manipulation capability, and UAV operation.
Related projects

Developed an autonomous healthcare robotics platform during the COVID-19 pandemic for ICU assistance, telepresence communication, patient monitoring, and autonomous medicine delivery.

Developed an autonomous PX4-based drone platform for utility-infrastructure inspection and copper-cable recovery using Mask R-CNN segmentation, monocular metric depth estimation, and vision-guided autonomous positioning.

Developed an autonomous crawlspace-inspection robot using ROS2, Nav2, SLAM Toolbox, frontier exploration, AI-based hazard detection, and remote iOS-based operation.