
Industrial Automation
FeaturedDetailsIOTive Industrial IoT Telemetry and Monitoring Platform
Led the research and development of industrial IoT telemetry systems based on STM32 embedded hardware, GSM communication, industrial Modbus networking, and cloud-connected monitoring infrastructure, with more than 2000 deployed devices across industrial and medical applications.
- STM32 Microcontrollers
- Embedded C
- GSM Communication
- Modbus RTU
- Modbus TCP
- ESXi
More than 2000 industrial devices deployed commerciallyAchieved approximately 99.99% operational uptime across deployed systems

Industrial Automation
FeaturedDetailsElectromagnetic Slag Detection and Steel Casting Optimization System
Developed an industrial electromagnetic slag-detection platform for molten-steel casting optimization using FPGA-based signal analysis, custom six-layer PCBs, industrial PLC systems, and real-time electromagnetic sensing.
- Zynq FPGA
- ARM Processing Systems
- Vivado
- Siemens S7-1200
- STM32H7
- Embedded C
Achieved approximately 88% slag-detection accuracySaved approximately 2 tons of steel per casting cycle

Industrial Automation
FeaturedDetailsIndustrial Capacitive Moisture Measurement and Heatmap Analysis System
Developed an industrial capacitive moisture-measurement system for drywall manufacturing using custom sensing hardware, STM32H7 embedded processing, Ethernet telemetry, and Qt-based heatmap visualization software.
- STM32H7
- Embedded C
- Ethernet Communication
- UDP Networking
- Qt
- NE555
Successfully developed custom industrial moisture sensing systemEnabled real-time drywall moisture distribution analysis

Automated Alpha Particle Beam Measurement System
Designed and developed an AVR-based embedded instrumentation system for precision scanning and measurement of alpha-particle beam intensity using sub-millimeter motion control, high-resolution current acquisition, and serial communication.
- AVR ATmega64
- Embedded C
- External 16-bit ADC
- Stepper Motor Control
- UART Serial Communication
Automated alpha-particle beam scanning processAchieved synchronized motion and measurement acquisition

Industrial Robotic Arm Development and Autonomous Manipulation Systems
Co-founded a robotics startup focused on development of industrial robotic arms, autonomous manipulation systems, ROS2-based robot control, EtherCAT motion systems, and computer-vision-guided robotics for industrial and cinematic applications.
- ROS2
- MoveIt2
- EtherCAT
- STM32H7
- Computer Vision
- Embedded C
Developed autonomous cinematic robotic camera platformImplemented human-following robotic camera capture system
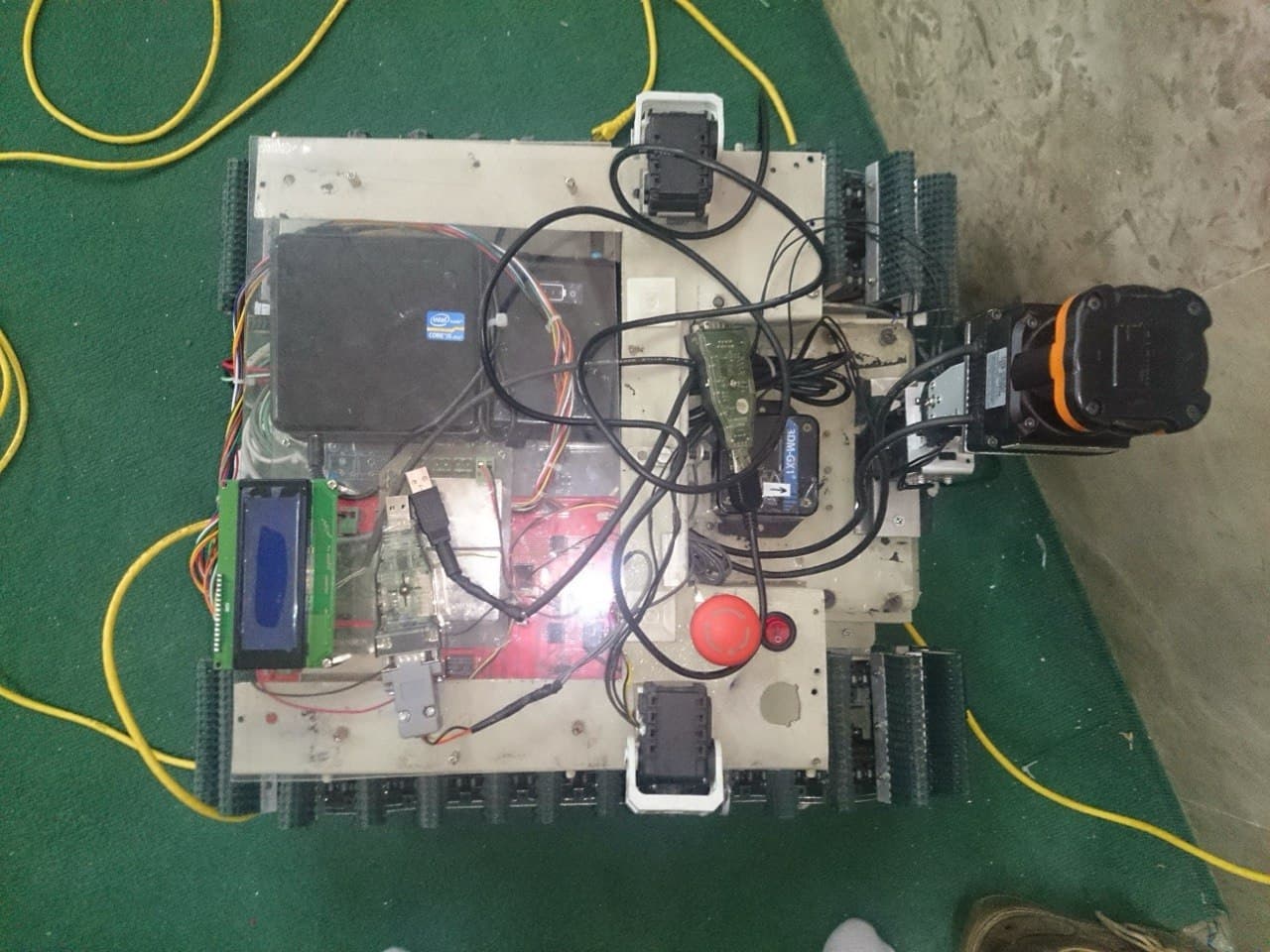
RoboCup Rescue Robot Platform and UAV Systems
Developed embedded control systems, autonomous navigation, SLAM, and UAV subsystems for the YRA RoboCup Rescue Team, achieving two international Best-in-Class first-place awards at RoboCup 2014 in Brazil.
- ROS1
- Hector SLAM
- AVR Microcontrollers
- Embedded C
- Fuzzy Logic Navigation
- UAV Control Systems
Achieved 1st Place Best-in-Class Manipulation at RoboCup 2014Achieved 1st Place Best-in-Class Small UAV at RoboCup 2014

Autonomous Pipe Inspection FPV Drone System
Developed an autonomous confined-space FPV drone system for pipe inspection using PX4 firmware modification, optical-flow fusion, laser-based centering, and YOLO-based defect segmentation.
- PX4
- Embedded C++
- Optical Flow
- YOLO Segmentation
- Computer Vision
- Laser Sensors
Successfully demonstrated autonomous pipe traversalImplemented laser-based autonomous centering system

AJNA Autonomous ICU Assistance and Telepresence Robot
Developed an autonomous healthcare robotics platform during the COVID-19 pandemic for ICU assistance, telepresence communication, patient monitoring, and autonomous medicine delivery.
- STM32F4
- Embedded C
- Computer Vision
- SLAM
- Ethernet Communication
- Android Application
Successfully developed autonomous ICU assistance platformEnabled remote doctor-patient communication

Autonomous Drone System for Copper Cable Recovery and Infrastructure Inspection
Developed an autonomous PX4-based drone platform for utility-infrastructure inspection and copper-cable recovery using Mask R-CNN segmentation, monocular metric depth estimation, and vision-guided autonomous positioning.
- PX4
- Mask R-CNN
- Depth Anything V2
- Python
- Computer Vision
- Autonomous Navigation
Successfully trained Mask R-CNN segmentation models for cable detectionImplemented monocular metric depth estimation using Depth Anything V2

Autonomous Solar Panel Cleaning Robot
Developed an autonomous robotic solar-panel cleaning system using computer vision, embedded control, and environmental sensing for industrial solar-farm deployment.
- STM32F4
- Embedded C
- Computer Vision
- Environmental Sensors
- Autonomous Navigation
Successfully deployed prototype systemDemonstrated autonomous solar-panel contamination detection

Autonomous Crawlspace Inspection Robot
Developed an autonomous crawlspace-inspection robot using ROS2, Nav2, SLAM Toolbox, frontier exploration, AI-based hazard detection, and remote iOS-based operation.
- ROS2
- Nav2
- SLAM Toolbox
- FastAPI
- Raspberry Pi
- Computer Vision
Successfully implemented ROS2 autonomous navigation stackDemonstrated SLAM-based crawlspace mapping
Industrial Automation
FeaturedDetailsIndustrial Drywall Process Monitoring and Telemetry System
Developed a distributed industrial process-monitoring system for drywall manufacturing using STM32 embedded hardware, Modbus RTU/TCP communication, custom infrared temperature sensing, and centralized Python-based monitoring software.
- STM32F4
- Embedded C
- RS485
- Modbus RTU
- Modbus TCP
- Python
Successfully deployed distributed industrial monitoring architectureEnabled real-time drywall process monitoring
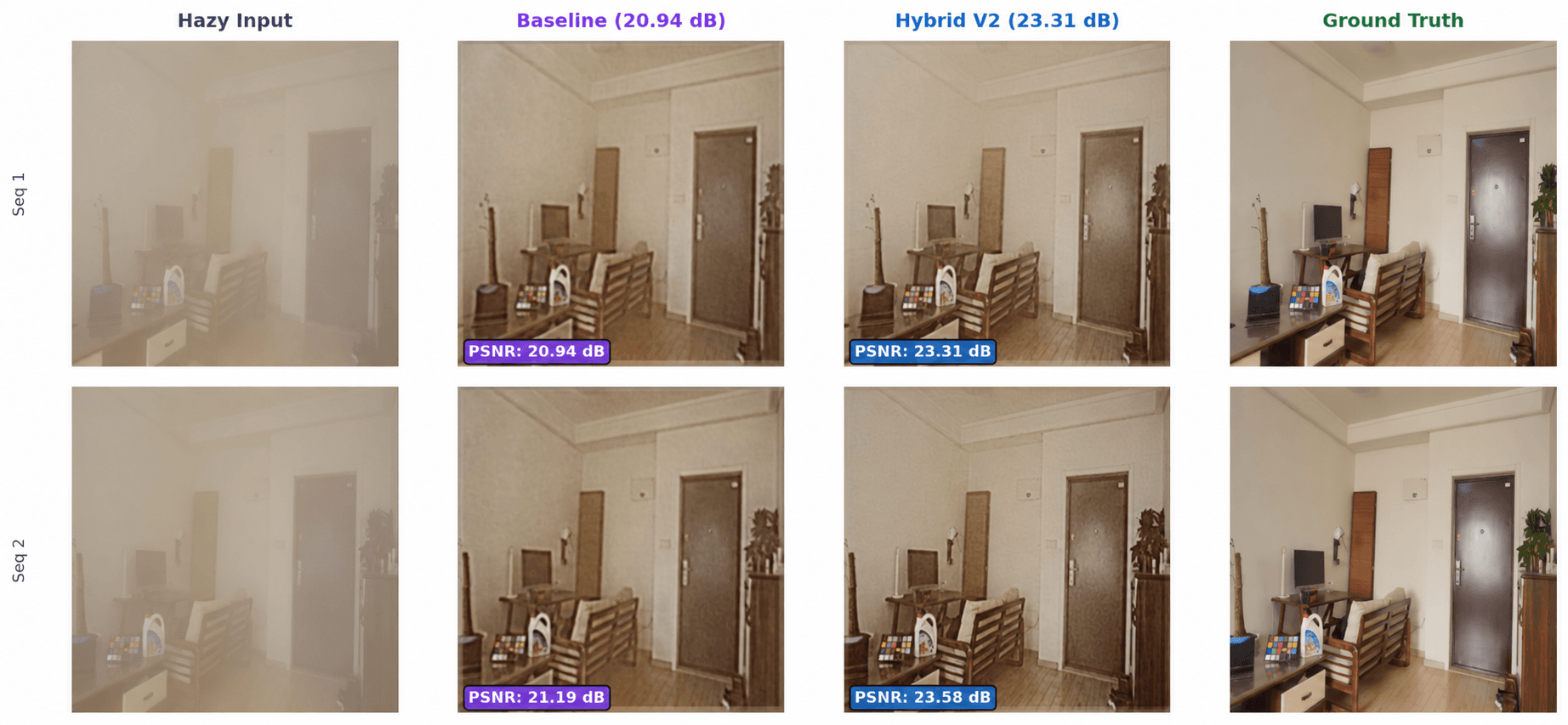
Industrial Image and Video Dehazing Research for Autonomous Vision Systems
Conducted industrial AI research on image and video dehazing using transformer-based architectures, diffusion-assisted reconstruction, optical flow, and hybrid dual-domain neural networks during a Mitacs internship at MacDon Industries.
- PyTorch
- Transformers
- Stable Diffusion
- Video Diffusion
- Optical Flow
- Deep Learning
Developed hybrid dual-domain transformer dehazing architecturesDeveloped image and video dehazing pipelines

Industrial Automation
FeaturedDetailsCustom CNC Automation and Vision-Guided Manufacturing Systems
Developed custom CNC automation systems including STM32-based GRBL motion controllers, industrial glue-application CNC platforms, and computer-vision-based manufacturing quality-control systems.
- STM32F4
- Embedded C
- GRBL
- Computer Vision
- Industrial CNC Systems
- Motion Control
Successfully developed custom STM32-based CNC controller systemsDeveloped functional three-axis CNC prototype platform
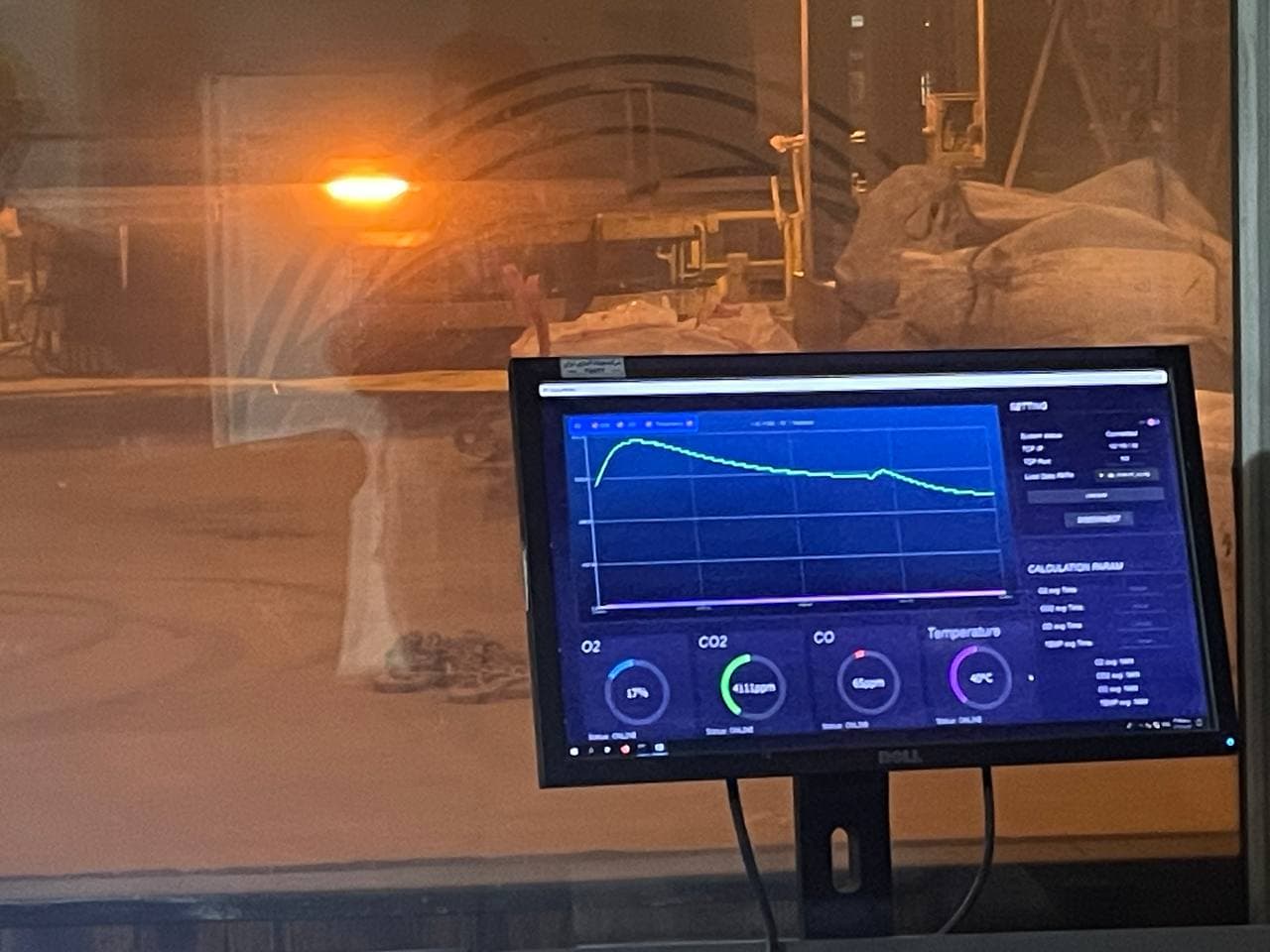
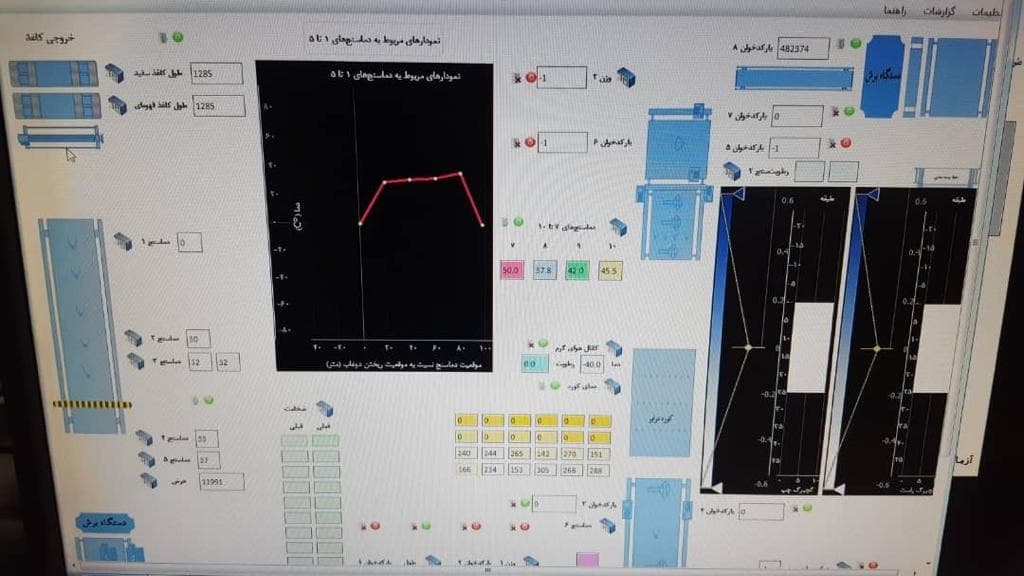
Industrial Automation
FeaturedDetailsVOD Process Gas Analysis and Industrial Monitoring System
Developed an industrial gas-analysis and process-monitoring system for stainless-steel VOD manufacturing using embedded sensing hardware, industrial gas sensors, and Qt-based visualization software.
- STM32F4
- Embedded C
- Qt
- C++
- Industrial Gas Sensors
- Industrial Telemetry
Successfully developed industrial VOD gas-analysis systemEnabled real-time stainless-steel process monitoring
Industrial Knowledge Base AI Assistant Using RAG and Qwen2.5
Developed a local industrial AI assistant for Iran Alloy Steel by converting an internal technical wiki into a Retrieval-Augmented Generation system powered by a locally deployed Qwen2.5 LLM.
- Qwen2.5
- Retrieval-Augmented Generation
- Vector Search
- Embeddings
- Python
- Local LLM Deployment
Developed local AI assistant for industrial technical knowledge accessEnabled semantic search over internal wiki documentation
Local LLM Portfolio Assistant with RAG on NVIDIA Jetson AGX Orin
Developed a locally deployed AI assistant integrated into this portfolio website using Retrieval-Augmented Generation and an NVIDIA Jetson AGX Orin for on-device inference.
- NVIDIA Jetson AGX Orin
- Ollama
- Local LLM Inference
- Retrieval-Augmented Generation
- Next.js
- TypeScript
Developed a fully local AI assistant integrated into the engineering portfolioEnabled conversational retrieval of robotics and AI project information